MATLAB/Simulink
磁気浮上モデル
概要
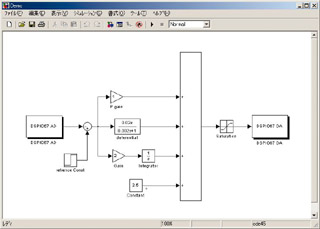
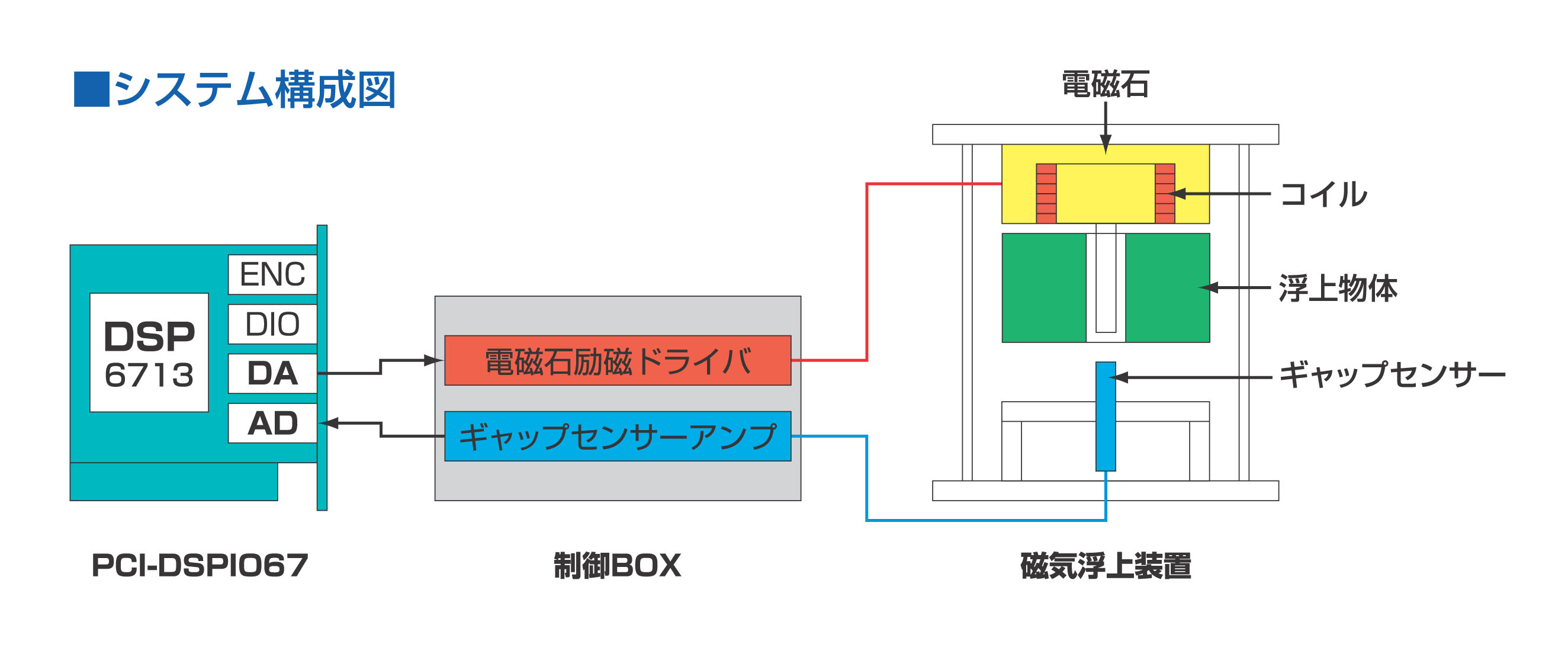
電磁石による浮上モデルは、距離(ギャップ)を一定に保つPID制御を行います。
浮上物体の運動方程式及び電磁石側のコイルを含む電気回路の方程式から状態方程式を
導きます。状態変数であるギャップ変化,浮上物体の速度,コイルを流れる電流の変化
を検出し、さらに変位の変化分の積分値を加味して、フィードバック制御を行うことに
より一定のギャップを保つことが可能となります。
|
|
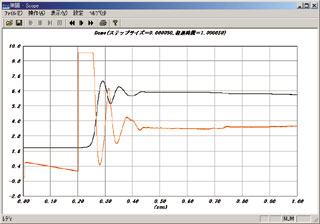
| PIDモデル | 制御波形表示 |
 |